Problem Statement
You are given an array points representing integer coordinates of some points on a 2D-plane, where points[i] = [xi, yi].
The cost of connecting two points [xi, yi] and [xj, yj] is the manhattan distance between them: |xi - xj| + |yi - yj|, where |val| denotes the absolute value of val.
Return the minimum cost to make all points connected. All points are connected if there is exactly one simple path between any two points.
Example 1:
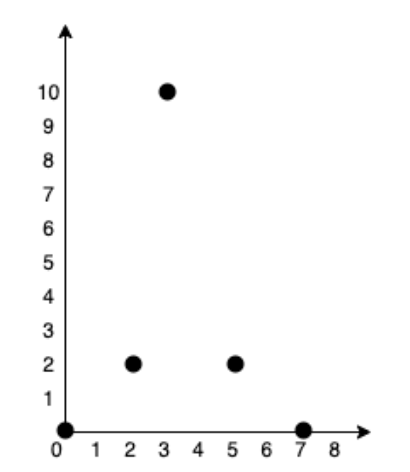
Input: points = [[0,0],[2,2],[3,10],[5,2],[7,0]]
Output: 20
Explanation:
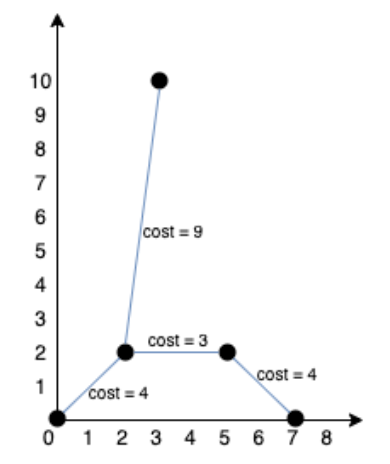
We can connect the points as shown above to get the minimum cost of 20. Notice that there is a unique path between every pair of points.
Example 2:
Input: points = [[3,12],[-2,5],[-4,1]]
Output: 18
Constraints
1 <= points.length <= 1000-106 <= xi, yi <= 106- All pairs
(xi, yi)are distinct.
Approach
- We want to
connect all points with the minimum total cost. The cost between two points is their Manhattan distance. This is essentially a Minimum Spanning Tree (MST) problem. - Start from any point (here, point 0).
- Maintain a
priority queueof edges [distance, node] to pick the smallest edge each time. - Keep track of visited points to avoid cycles.
- Each time we pick the smallest edge to an unvisited point, add its distance to
minCostand mark the point visited. - Push all edges from the newly visited point to
unvisited pointsinto the priority queue. Repeat until all points are visited.- The sum of all chosen
edge distances (minCost).
Time & Space Complexity
Time Complexity: O(n2log n)
Space Complexity: O(n2)
Dry Run
Input:
points = [[0,0],[2,2],[3,10],[5,2]]
Step 0: Start Function: minCostConnectPoints(points)
Step 1: Initialize Variables n = 4 visited = [false, false, false, false] minCost = 0 edgesUsed = 0 pq = [[0, 0]] // [distance, node]
Step 2: Start while loop (edgesUsed < n) Pop pq → [0, 0] node = 0, nodeDist = 0 visited[0] = true minCost = 0 + 0 = 0
edgesUsed = 0 + 1 = 1
Explore neighbors of node 0: - nextNode = 1 → distance = |0-2| + |0-2| = 4 → push [4,1] - nextNode = 2 → distance = |0-3| + |0-10| = 13 → push [13,2] - nextNode = 3 → distance = |0-5| + |0-2| = 7 → push [7,3] pq = [[4,1],[13,2],[7,3]]
Step 3: Next iteration Pop pq → [4, 1] node = 1,
nodeDist = 4 visited[1] = true minCost = 0 + 4 = 4
edgesUsed = 1 + 1 = 2
Explore neighbors of node 1: - nextNode = 2 → distance = |2-3| + |2-10| = 9 → push [9,2] - nextNode = 3 → distance = |2-5| + |2-2| = 3 → push [3,3] pq = [[3,3],[7,3],[13,2],[9,2]]
Step 4: Next iteration Pop pq → [3,3] node = 3,
nodeDist = 3 visited[3] = true minCost = 4 + 3 = 7
edgesUsed = 2 + 1 = 3
Explore neighbors of node 3: - nextNode = 2 → distance = |5-3| + |2-10| = 10 → push [10,2] pq = [[7,3],[9,2],[13,2],[10,2]]
Step 5: Next iteration Pop pq → [7,3]
node 3 already visited → skip Pop pq → [9,2] node = 2,
nodeDist = 9 visited[2] = true minCost = 7 + 9 = 16
edgesUsed = 3 + 1 = 4
All nodes visited → exit while loop
Step 6: Return Result minCost = 16
Output: 16
var minCostConnectPoints = function(points) {
let n = points.length;
let pq = new MinPriorityQueue(x => x[0]);
let minCost = 0;
let visited = new Array(n).fill(false);
pq.push([0, 0]);
let edgesUsed = 0;
while(edgesUsed < n){
let [nodeDist, node] = pq.pop();
if(visited[node]) continue;
visited[node] = true;
minCost = minCost + nodeDist;
edgesUsed++;
for(let nextNode = 0; nextNode < n; ++nextNode) {
if(!visited[nextNode]) {
let nextDist =
Math.abs(points[node][0] - points[nextNode][0]) +
Math.abs(points[node][1] - points[nextNode][1]);
pq.push([nextDist, nextNode]);
}
}
}
return minCost;
};
import heapq
def minCostConnectPoints(points):
n = len(points)
minCost = 0
visited = [False] * n
edgesUsed = 0
pq = [(0, 0)] # (distance, node)
while edgesUsed < n:
nodeDist, node = heapq.heappop(pq)
if visited[node]:
continue
visited[node] = True
minCost += nodeDist
edgesUsed += 1
for nextNode in range(n):
if not visited[nextNode]:
nextDist = abs(points[node][0] - points[nextNode][0]) + \
abs(points[node][1] - points[nextNode][1])
heapq.heappush(pq, (nextDist, nextNode))
return minCost
import java.util.*;
class Solution {
public int minCostConnectPoints(int[][] points) {
int n = points.length;
boolean[] visited = new boolean[n];
int minCost = 0, edgesUsed = 0;
PriorityQueue pq = new PriorityQueue<>(Comparator.comparingInt(a -> a[0]));
pq.offer(new int[]{0, 0}); // {distance, node}
while (edgesUsed < n) {
int[] curr = pq.poll();
int nodeDist = curr[0];
int node = curr[1];
if (visited[node]) continue;
visited[node] = true;
minCost += nodeDist;
edgesUsed++;
for (int nextNode = 0; nextNode < n; nextNode++) {
if (!visited[nextNode]) {
int nextDist = Math.abs(points[node][0] - points[nextNode][0]) +
Math.abs(points[node][1] - points[nextNode][1]);
pq.offer(new int[]{nextDist, nextNode});
}
}
}
return minCost;
}
}
#include <bits/stdc++.h>
using namespace std;
int minCostConnectPoints(vector>& points) {
int n = points.size();
vector visited(n, false);
int minCost = 0, edgesUsed = 0;
priority_queue, vector>, greater>> pq;
pq.push({0, 0}); // {distance, node}
while (edgesUsed < n) {
auto [nodeDist, node] = pq.top(); pq.pop();
if (visited[node]) continue;
visited[node] = true;
minCost += nodeDist;
edgesUsed++;
for (int nextNode = 0; nextNode < n; ++nextNode) {
if (!visited[nextNode]) {
int nextDist = abs(points[node][0] - points[nextNode][0]) +
abs(points[node][1] - points[nextNode][1]);
pq.push({nextDist, nextNode});
}
}
}
return minCost;
}
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <limits.h>
int minCostConnectPoints(int** points, int n) {
int* visited = (int*)calloc(n, sizeof(int));
int minCost = 0, edgesUsed = 0;
int* minDist = (int*)malloc(n * sizeof(int));
for (int i = 0; i < n; i++) minDist[i] = INT_MAX;
minDist[0] = 0;
while (edgesUsed < n) {
int u = -1;
for (int i = 0; i < n; i++) {
if (!visited[i] && (u == -1 || minDist[i] < minDist[u]))
u = i;
}
visited[u] = 1;
minCost += minDist[u];
edgesUsed++;
for (int v = 0; v < n; v++) {
if (!visited[v]) {
int dist = abs(points[u][0] - points[v][0]) + abs(points[u][1] - points[v][1]);
if (dist < minDist[v]) minDist[v] = dist;
}
}
}
free(visited);
free(minDist);
return minCost;
}
using System;
using System.Collections.Generic;
public class Solution {
public int MinCostConnectPoints(int[][] points) {
int n = points.Length;
bool[] visited = new bool[n];
int minCost = 0, edgesUsed = 0;
var pq = new SortedSet<(int dist, int node)>();
pq.Add((0, 0));
while (edgesUsed < n) {
var curr = pq.Min;
pq.Remove(curr);
int nodeDist = curr.dist;
int node = curr.node;
if (visited[node]) continue;
visited[node] = true;
minCost += nodeDist;
edgesUsed++;
for (int nextNode = 0; nextNode < n; nextNode++) {
if (!visited[nextNode]) {
int nextDist = Math.Abs(points[node][0] - points[nextNode][0]) +
Math.Abs(points[node][1] - points[nextNode][1]);
pq.Add((nextDist, nextNode));
}
}
}
return minCost;
}
}
